The overall signature of a vessel comprises acoustic, magnetic, electric-field, pressure and seismic radiations. Over the past years international community’s efforts have mainly centred on reducing the acoustic influence with the dual aim of decreasing the vessel detectability and reducing the level of acoustic pollution generated in the marine environment. Nowadays it is becoming increasingly clear the necessity of acting not only on the acoustic radiation but against the overall set of the vessel’s radiations, both in the military and the civilian fields, based on aspects such as the stealthiness of the vessels, the security of harbour and critical infrastructures and the environmental protection. As a key element to achieve this goal, it is greatly important to have at our disposal highly modular and adaptable measurement systems covering the overall set of vessel’s radiations, with a high capacity of data transmission to base centres in order to have the capacity of taken measurements in all kind of marine environments.
The overall signature of a vessel comprises acoustic, magnetic, electric-field, pressure and seismic radiations. Over the past years international community’s efforts have mainly centred on reducing the acoustic influence with the dual aim of decreasing the vessel detectability and reducing the level of acoustic pollution generated in the marine environment. Nowadays it is becoming increasingly clear the necessity of acting not only on the acoustic radiation but against the overall set of the vessel’s radiations, both in the military and the civilian fields, based on aspects such as the stealthiness of the vessels, the security of harbour and critical infrastructures and the environmental protection. As a key element to achieve this goal, it is greatly important to have at our disposal highly modular and adaptable measurement systems covering the overall set of vessel’s radiations, with a high capacity of data transmission to base centres in order to have the capacity of taken measurements in all kind of marine environments.
1. INTRODUCTION
All the vessels, independently of their shape and size, emit to the sea a set of radiations that make up the so-called vessel signature. This signature characterizes and identifies univocally the vessel in the same way that the fingerprint identifies the human being. The importance of this signature is well-known since early the past century, mainly in the defense field and specially centered on the so-called acoustic and magnetic signatures. As an example, detection of vessels based on their acoustic signatures had a great importance in the naval field during the Second World War.
In parallel with technological improvements during the 20th century, and especially in the defense field, specific techniques have been developed to get smaller the level of the radiations emitted to the sea by vessels. At the beginning, reduction techniques were limited to the acoustic radiation. Next, the magnetic radiation was also taking into consideration and more recently the electric-field, pressure and seismic radiations have also been considered of interest. The group of five radiations referred to above make up the so-called multi-influence signature of a vessel. In Figure 1 an example of the simulated electric signature radiated by a sweep gear is shown.

The monitoring of the multi-influence signature has a great importance in the defense field and in the case of vessels such as submarines becomes a matter of survival. Also, it is becoming increasingly important in the civilian field related to the marine environment preservation, especially in the case of the marine fauna living in this environment, due to the influence of these radiations on their behaviour. Finally, it is worth to outcome that the detection of this signature permits us to determine the presence of threats in harbours/ports, critical infrastructures or cultural assets located on the sea floor, making it possible to implement specific actions to neutralize these threats.
This paper comprises four sections in addition to this introduction section: in the first section the main characteristics of the radiations that make up the multi-influence signature are described. In the next two sections, the importance of this signature in the defense and civilian fields is analyzed. In the next section, a system especially adapted to measure multi-influence signatures is described. Finally, the paper is completed with the conclusion of the study.
2. CHARACTERISTICS OF THE MULTI-INFLUENCE SIGNATURE OF A VESSEL
As previously stated, the multi-influence signature of a vessel comprises five types of radiation: acoustic, magnetic, electric, pressure and seismic. Each of them incorporates specific characteristics. Next, a brief description of their main characteristics is presented.
Acoustic radiation
The sound generated by a vibrating source is propagated as a wave in an elastic medium such as the sea, originating pressure changes that are susceptible of being measured.
The underwater sound propagation characterises by its high performance, being in fact the way of radiation today known that best propagates through this medium [1], being able to reach long distances in the case of low frequencies.
Vessels emit two types of generic signals: broadband and narrowband. The former characterises by covering a wide spectrum of frequencies, meanwhile the latter is limited to a narrow spectrum.
There are different sound sources in vessels. The three main are: machinery noise, propeller noise, and hydrodynamic noise. In Figure 2 a scheme of sound underwater propagation obtained from an underwater acoustic propagation model is shown.

Magnetic radiation
The ship magnetic influence is composed by two components: the static component (SM) and the alternating one (AM). The static component is generated by the permanent and induced magnetic fields.
The permanent magnetic field of the ship is due to the magnetization of its construction magnetic materials by the Earth’s magnetic field. Besides, the Earth’s magnetic field, as an extern magnetic field, always contributes to the ship magnetic signature. This component depends on the ship course and localization of the area.
In addition to permanent and induced magnetic fields, CRM (Corrosion Related Magnetic) field also contributes to the static magnetic component of the signature. This field is due to the existence of corrosion currents through the sea water, which have an associated magnetic field.
The alternating component of magnetic signature is generated by:
- The currents in the rotating coils of ship turbines. These coils perform as magnetic dipoles, which generate AC magnetic signature.
- Sea water Foucault currents induced by the magnetic dipoles. These currents are time varying and are associated also with alternating electric fields.
- Electric currents flowing through ship hull due to electric equipment failures or inadequate design.
- Inherent magnetic field radiated by any rotating electric machinery in the ship.
Besides, power supply ripple generates alternating currents through the water. In Figure 3 an example of simulation of the magnetic field generated by a vesselis shown.

Electric-field radiation
The ship electric signature is composed by two components: the static component UEP (Underwater Electric Potential) and the alternating component ELFE (Extremely Low Frequency Electric).
The static component UEP represents the near field influence and its temporal variation depends on speed and size of the ship. The static electric signature of a ship is due to the electric currents generated by the galvanic corrosion process. In order to avoid this corrosion, cathodic protection systems are used. There exist two types of cathodic protection systems: passive and active or ICCP (Impressed Current Cathodic Protection). The passive systems use sacrifice anodes, whereas active systems use impressed current anodes and reference electrodes. Quite often, cathodic protection systems contribute drastically to electric signature and constitute the main generator for this influence.
The alternating component ELFE covers a bandwidth of approximately 3 kHz and represents the near and far field influence. ELFE component is due to the following factors:
- Modulation of the corrosion current: galvanic current is modulated due to the spin of blades and propellers.
- Ripple in machinery power supply of the ship. It appears a tone of frequency corresponding to the power supply frequency.
- Ripple in degaussing systems ICCP, corresponding to the modulation suffered by the ICCP system current due to variations in the resistance between the shaft and hull of the ship.
In Figure 4 is shown an example of simulation of the electric signature radiated by a vessel.

Pressure radiation
Hydrostatic pressure due to water depth varies slowly with atmospheric pressure changes and tide rising and falling. Besides, it can vary fast with waves and train of waves, or with a ship.
Pressure variation due to a ship movement is usually very small. This small variation constitutes the ship pressure signature and it is produced by Bernoulli Effect of the water flowing from bow to stern. This flow originates a pressure increase at bow and stern of the ship and a decrement in the central zone (suction), which peak is directly proportional to ship speed and its underwater shape. Figure 3, shows this pattern in a simulation of the pressure signature of a ship.
Therefore, induced pressure fluctuations by the ship superpose with the nominal static pressure of the bottom and natural disturbances caused by tide, waves and swells.

Seismic radiation
Seismic influence is generated by the same sources as for the acoustic influence. When an acoustic wave reaches a surface, the majority of the energy is reflected but a percentage is absorbed by the new medium.
Thus, acoustic signals of very low frequency (below 10Hz) propagate up to the sea floor and transmit through it as a seismic perturbance. This type of perturbance travels much faster through sea floor than through sea water.
From this seismic point of view it is obvious that the acoustic energy penetrating into the sea floor may sometimes contribute considerably to medium-range and long-range acoustic transmission. One clear example that shows seismic influences behavior is the existence of a critical frequency. For all frequencies below this limit absorption phenomena in incident waves appears, and this phenomena depends on characteristics of the materials and layers of the see floor.

3. THE MULTI-INFLUENCE SIGNATURE IN THE DEFENSE FIELD
The intelligence databases have become an element of great importance for the navies of the different countries. These databases contain as distinctive data the signatures of the vessels. At the beginning they contained acoustic data and sometimes magnetic data. Currently, they seek to incorporate also data corresponding to the rest of influences. These databases permit us to discriminate not only the type and class of the vessel but also the specific unit of the class, providing a considerable tactical advantage.
Currently, the trend of the last decades relative to the reduction of the vessels signature is being accentuated. This trend is particularly intense in the case of submarines. They seek to increase their level of protection becoming every time more stealth vessels as a mean to counter-act the development of increasingly intelligent weapons such as last generation torpedoes. In Figure 7 an image of type U-206 submarines is shown.
In parallel with that stated above, every time more sophisticated systems incorporating a wide range of sensors are being developed nowadays. The use of these multi-influence systems permits vessels to increase significantly their detection capacities from the combination of the data provided by their suite of sensors, making it possible a considerable reduction in the number of false alarms.
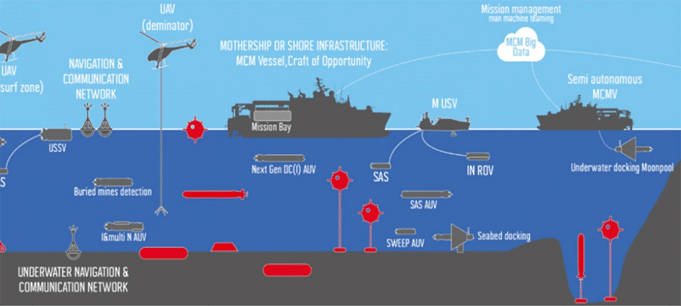
By other hand, in the defense facilities protection field the use of these multi-influence sensors is permitting to increase their security in a significant way. This fact is based on the early and more accurate detection of the threats coming from the marine environment, such as: divers moving autonomously, manned and unmanned underwater vehicles (SDV, ROV, UUV), mini-submarines, etc.

4. THE MULTI-INFLUENCE SIGNATURE IN THE CIVILIAN FIELD
During the last years, a growing awareness has emerged worldwide on the necessity of protecting the marine environment, especially from the human activities such as: fishing, sailing, harbour works or seismic oil and gas explorations that convey significant increases in the level of a range of pollutants such as acoustic noise and other sources or energy including theelectric and magnetic ones.
This growing awareness has entailed the development of a range of national and international regulations focus to get an effective preservation of the marine environment. Among these regulations is the Marine Strategy Framework Directive, promulgated by the European Union in the year 2008, which introduces a set of qualitative descriptors to determine the good environmental status. One of these descriptors states that: “The introduction of energy, including underwater noise, is at levels that no adversely affect the marine environment”. The effective application of this Directive, and of other regulations related with the marine environment protection, implies both the measurement of the level of the energy radiations emitted to the sea [2] and the detection of the marine fauna presence in specific areas on which high energy levels are detected, with the aim of protecting this fauna from the potential harmful effects of theradiated energy.This detection is mainly based on acoustic sensors, although other alternative detection means are currently being analyzed, such as the detection of the marine fauna based on the alteration of the underwater electric or magnetic fieldsoriginated by its presence. In Figure 8 two kinds of cetacean species: bottlenose dolphin and sperm whale are shown. Both are endangered species.
Just like in the defense field, the use of multi-influence sensor systems provides an effective protection of harbours and critical infrastructures, such as oil refineries and thermal power stations, against hostile intruders. This protection can also be extended to other fields of remarkable interests as is the case of marine reserves, ship wrecks or underwater archaeological remains.

5. MULTI-INFLUENCE SIGNATURE MEASUREMENTS
With regards to multi-influence measurements, the trend in the civilian field is to advance towards a standardisation process in the procedures and parameters of the measurements. These standards already exist since time ago in the defense field. The precursor of this process is again the acoustic influence for which a standard has recently (2009) been developed by the Acoustical Society or America (ASA): “Quantities and Procedures for Description and Measurement of Underwater Sound from Ships”. Additionally, in the European Union scope there exist specific programs focused to the definition of a European standard. Measurements are usually normalised to common references in order to be able to compare these coming from different systems, as is the case of the 1-meter from the source reference for acoustic measurements or a common reference point for all the vessels in the case of electric and magnetic fields measurements.
The fact that multi-influence sensors provide different detection ranges permits us to establish different detection layers as a function of the sensor range, Detection ranges depend on both the specific characteristics of the marine environment and these ones of the vessel under test and the used sensors. In a first approach, it can be stated that both acoustic and seismic sensors provide detection distances in the range of kilometers, being the seismic sensor especially dependent on the characteristics previously referred to, electric-field and magnetic sensors in the range of hundreds of meters and pressure sensors in the range of tens of meters.
The wide range of operational environments in which multi-influence measurements are susceptible to be taken makes highly advisable to have at our disposal modular and portable systems with small dimensions and weights. These kinds of systems permit us their deployment and recovery in different marine areas within a reduced time interval and without requiring complex means. Other aspects to be stressed are: the capacity of data transmission to base centers (located on shore or onboard vessels) with an adequate bandwidth to cover the characteristics of the signatures under test and the capacity of storing and processing the measured influences, focused to provide accurate and useful information to the system operator.
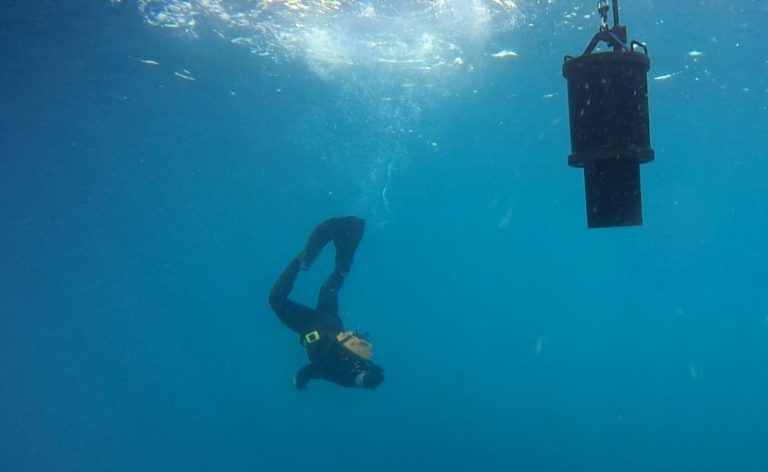
As an example of a system that complies with the characteristics previously described is found the MIRS system developed by SAES (see underwater units deployed on the sea bottom in Figure 9).

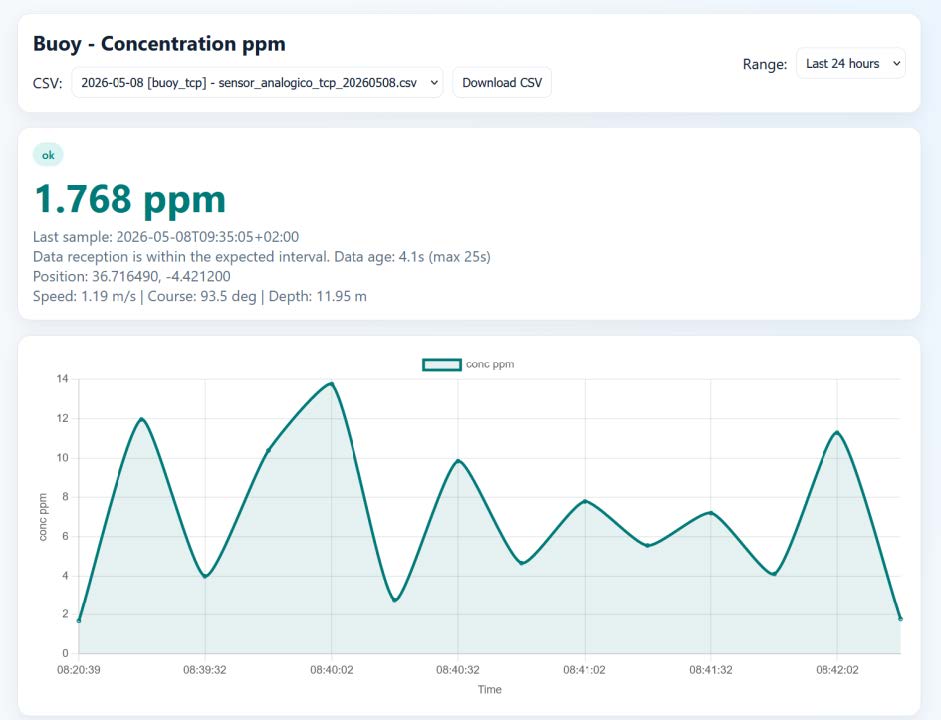
The MIRS system has been tested in operational environments showing its versatility,ease of use and accuracy taken as reference calibrated systems. In Figure 10 graphic outputs of the multi-influence signature of a merchant vessel are shown.

6. CONCLUSION
All vessels when sailing through the sea radiate a set of influences (acoustic, magnetic, electric, pressure and seismic) that make up their multi-influence signature. Some of these influences (acoustic and magnetic) have being measured since decades ago to characterise the vessels in the defense field and to monitor the acoustic pollution in the civilian field. Recently the interest in the international community on having at our disposal the overall signature of the vessels has emerged, with the aim of evaluating globally its impact on the marine environment.
In the defense field, from the point of view of the own fleet to have at our disposal multi-influence data from vessels permits us to perform specific tasks and studies focused to reduce the own signature in order to decrease the probability of being detected. By other hand, from the point of view of the threats this data permits us to characterise the vessels signature with the aim of increasing our capacity to detect them.
In the civilian field, the interest is centered on the marine environment preservation, especially of its marine fauna. In the dual defense-civilian field, protection systems based on multi-influence sensors constitute a highly efficient mean to detect hostile intruders.
Due to the variety of operational areas in the marine environment it is highly advisable to have at our disposal modular systems with contrasted capacities of data transmission, recording of the measurements and processing focused to provide relevant information to the system operator. The MIRS system developed by SAES configures as a verified and in-service system than complies with the requirements established for the multi-influence measurement of all kind of platforms or naval devices in the whole spectrum of operational environments.
REFERENCES
[1] R. J. Urick. Principles of Underwater Sound.McGraw-Hill (1993).
[2] W. J. Richardson, C. R. Green, C. I. Malme, D. H. Thomson. Marine mammal and noise. Academic Press Inc. (1995).