SAES ofrecerá una conferencia sobre el sistema para la operación remota de guerra antisubmarina (ROASW), el más avanzado de su clase actualmente, en UNVEX 2014. El sistema ROASW ha sido diseñado para satisfacer los nuevos requisitos que deben afrontarse en las misiones ASW.
 SAES – Electrónica Submarina, asistirá la semana próxima al III congreso sobre vehículos no tripulados UNVEX’2014 que tendrá lugar en Madrid de 4 al 6 de Marzo. Dentro del programa de conferencias, el responsable de sistemas ASW en SAES, Ignacio Gutiérrez, expondrá su nueva solución ASW, en una conferencia titulada “Soluciones de la Industria II”, programada para el Martes 4 de Marzo a las 13.00 horas.
SAES – Electrónica Submarina, asistirá la semana próxima al III congreso sobre vehículos no tripulados UNVEX’2014 que tendrá lugar en Madrid de 4 al 6 de Marzo. Dentro del programa de conferencias, el responsable de sistemas ASW en SAES, Ignacio Gutiérrez, expondrá su nueva solución ASW, en una conferencia titulada “Soluciones de la Industria II”, programada para el Martes 4 de Marzo a las 13.00 horas.
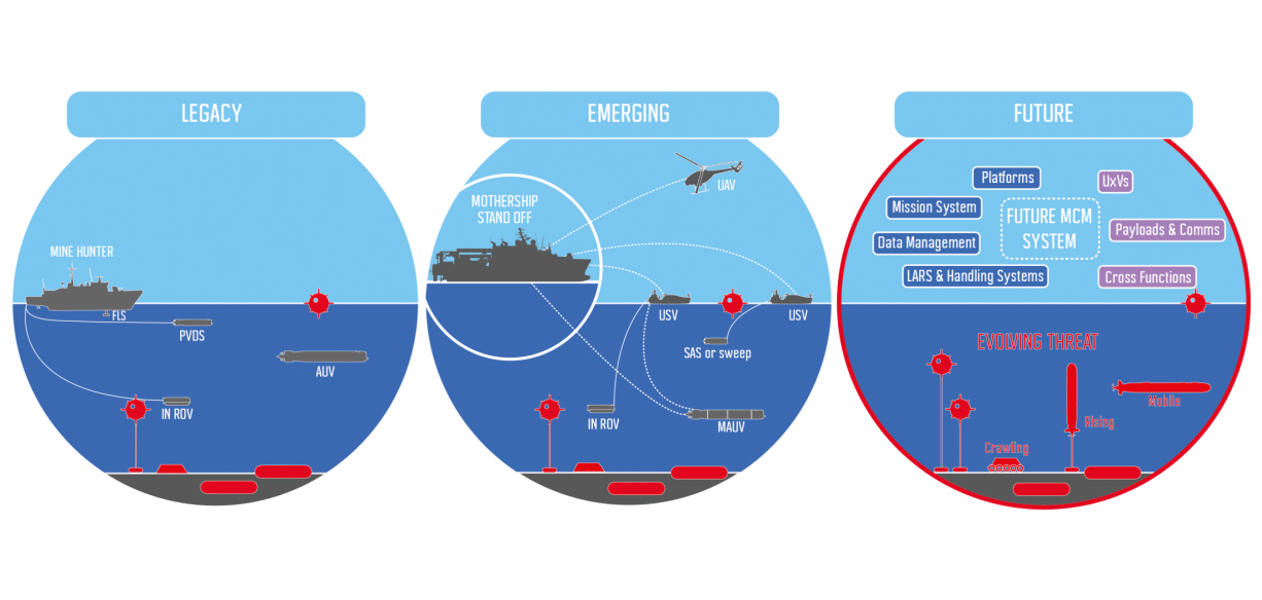
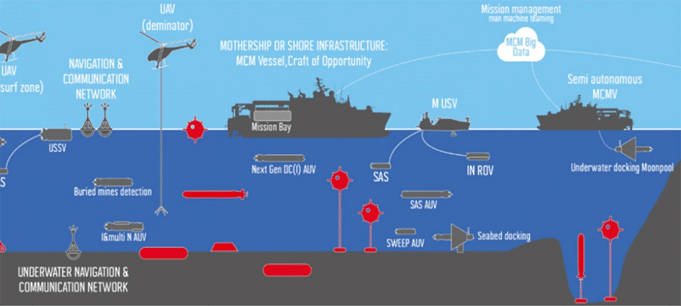
Las nuevas misiones ASW requieren el uso de UAVs como plataforma distante y elevada sin operador dedicado. Además, las diferentes plataformas desplegadas en la misión han de compartir información táctica y de inteligencia. En esto contexto, el avanzado sistema ROASW cobra total relevancia, ya que está diseñado específicamente para estos nuevos requisitos de las misiones ASW.
El Segmento aeroembarcado del ROASW (ROASW-AS) puede ser instalado en vehículos aéreos tripulados o no tripulados, y se opera de forma remota desde el segmento de superficie (SDL-SS), que se instala en plataformas de superficie (ya sea en un buque o en una estación de tierra).
De esta forma, el sistema ROASW permite colaborar en una Network Centric Warfare (NCW) intercambiando información táctica y de inteligencia entre los distintos recursos desplegados en la misión ASW, mejorando el control de la misión e incrementando el rango de detección.
El siguiente enlace muestra un vídeo descriptivo de la funcionalidad y prestaciones del sistema ROASW.
https://electronica-submarina.com/lineas-de-negocio/sistemas-embarcados/sdl_embarcado/