El interés por los Sistemas de Protección de Puertos ha aumentado desde el 11 de septiembre. La industria está desarrollando sistemas capaces de detectar pequeñas amenazas submarinas como buceadores, UUV, ROV o SDV. Hoy en día, la gran mayoría de los sistemas utilizan la teoría acústica activa para detectar y rastrear las amenazas. Los sistemas acústicos activos tienen el problema de que son detectables. Además, el campo acústico cerca del puerto es muy ruidoso y reverberante, lo que disminuye la probabilidad de detección.
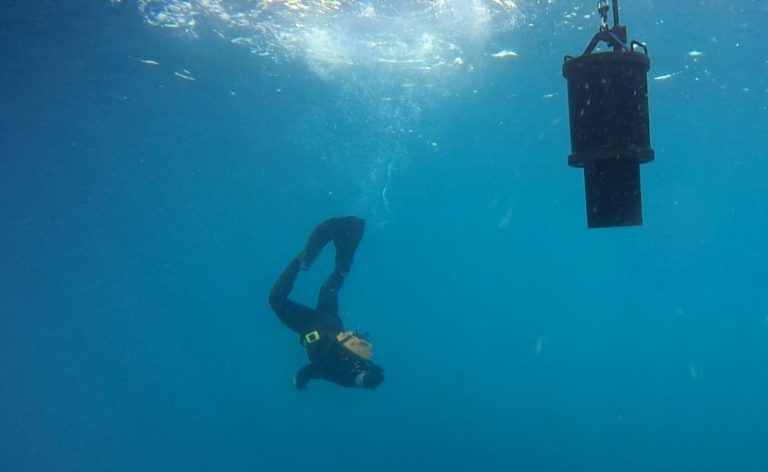
Este artículo presenta un método de detección de amenazas submarinas basado en las influencias UEP y ELFE. Se utiliza un algoritmo de detección para determinar la presencia de una posible amenaza. Se presenta un estudio de la distancia de detección frente a la intensidad de la fuente eléctrica y varias simulaciones de software de diferentes amenazas como UUV y SDV. Los resultados de las simulaciones muestran que estos vehículos pueden ser detectados cuando se acercan a la ubicación de los sensores basándose en sus influencias eléctricas. SAES ha desarrollado un sistema de Rango de Medición de Firma Eléctrica Portátil (PESRM) para crear un sistema de detección de amenazas submarinas basado en mediciones de campo eléctrico. Se han realizado pruebas en el mar con el PESRM para determinar el rango de detección de un buceador y un dipolo eléctrico pasivo real que emula el campo eléctrico generado por un vehículo submarino.
En este artículo se discuten los resultados de las pruebas en el mar. La distancia de detección de las diferentes amenazas se utilizará más adelante para planificar la separación de múltiples subsistemas PESMR que forman parte de un Sistema Integrado de Protección de Puertos (IHPS) para crear una barrera de protección y un área de seguridad submarina.
Lee el artículo completo aquí (en inglés):