The interest for Harbour Protection Systems has increased since 9/11. The industry is developing systems capable of detecting small underwater threats as divers, UUV, ROVs or SDVs. Nowadays, the great majority of systems use the active acoustic theory to detect and track the threats. The active acoustic systems have the problem that they are detectable. Also, the acoustic field close to the harbour is very noisy and reverberating decreasing the detection probability.
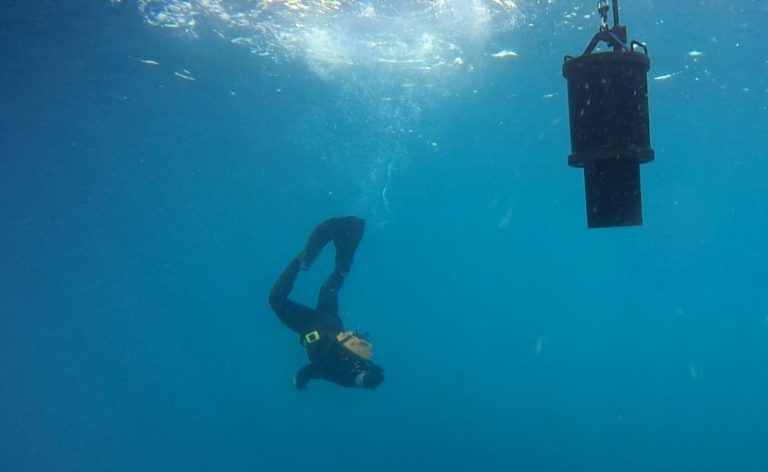
This paper introduces an underwater threat detection method based on the UEP and ELFE influences. A detection algorithm is used to determine the presence of a possible threat. A study of detection distance versus electric source strength and several software simulations of different threats as UUV and SDV are presented. The simulation results shown that these vehicles can be detected when approaching to the sensors location based on their electric influences. A Portable Electric Signature Measurement Range (PESRM) system has been developed by SAES to create an underwater threat detection system based on electric field measurements. Sea trials have been performed with the PESRM to determine the detection range of a diver and a real passive electric dipole emulating the electric field generated by an underwater vehicle.
In this paper the results of the sea trials are discussed. The detection distance of the different threats will be used later on to plan the separation of multiple PESMR sub-systems making part of an integrated Harbour Protection System (IHPS) to create a protection barrier and an underwater safety area.
Read the full paper here: