SAES will present in the Conference UDT (Undersea Defense Technology) – Europe 2014 a paper about ASW systems solutions that meet with the new necessities of ASW missions.
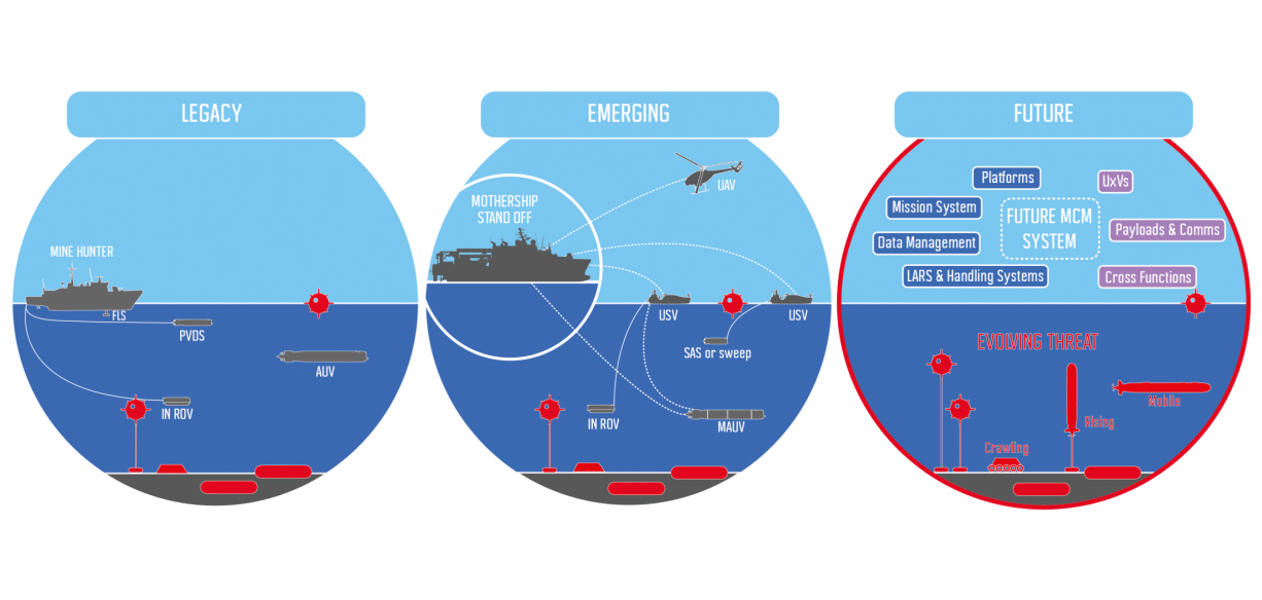
 The emergence of new military technologies has dramatically affected to the traditional Concept of Operation of the Anti Submarine Warfare Missions (ASW). Modern submarines have technological advances in enhanced propulsion, quieting techniques and coordinated weapons technologies. In turn, new geopolitical scenarios in the world constrain naval forces involved in the ASW missions to the littoral waters.
The emergence of new military technologies has dramatically affected to the traditional Concept of Operation of the Anti Submarine Warfare Missions (ASW). Modern submarines have technological advances in enhanced propulsion, quieting techniques and coordinated weapons technologies. In turn, new geopolitical scenarios in the world constrain naval forces involved in the ASW missions to the littoral waters.
In the 21st Century, ASW missions requires:
– to deploy the forces in a Secure Friendly Maneuver Area to enhance their security close to the coast
– to prioritize the use of smaller and faster combat ships (OPV, corvettes, FAC) able to share tactical and intelligence information exploiting the benefits of a Network Centric Warfare (NCW)
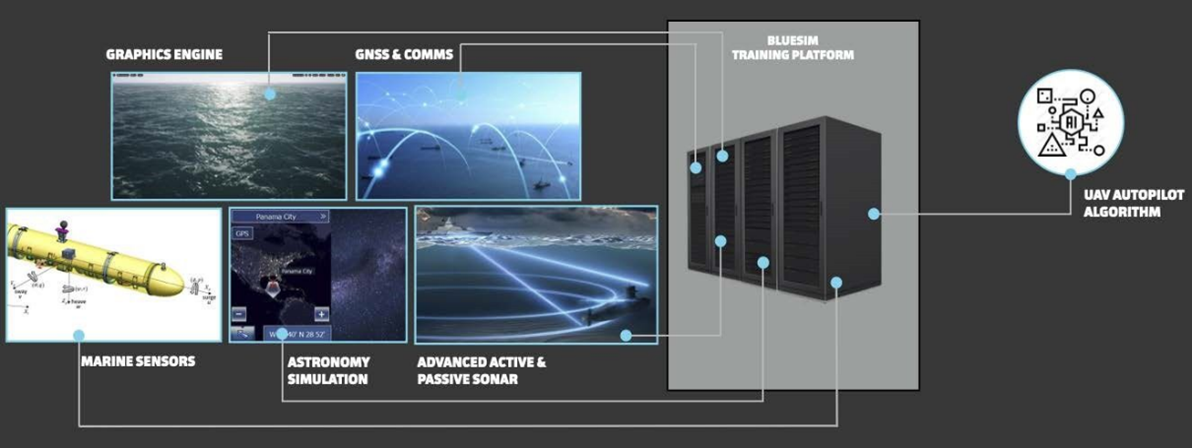
– to use unmanned vehicles (UAV or USV) to deploy sonobuoys and relay the acoustic information either to combat ships or ground stations
– to have the ability to make quick and agile centralized decisions in order to drive all the deployed forces as if they were a single and powerful weapon.
In this new ASW context, and with the objective to continue at the forefront of the ASW systems, in the year 2004 SAES assumed the challenge of design and manufacturing a system capable to participate in these new ASW missions: Remote Operation ASW System (ROASW).
ROASW – Remote Operation ASW System
The ROASW system is a new Anti-Submarine Warfare (ASW) solution providing a unique, fully integrated ship/air weapon system, initially designed to enhance and extend the ship acoustic sensors. The ROASW system receives controls and monitories remotely the acoustic and tactical information from deployed resources.
ROASW is a two Segment System – AS (Airborne Segment) & SS (Surface Segment):
– ROASW-AS is a distant and elevated platform for sensors. The ROASW-AS provides remote ASW capabilities without the need of a dedicated sensor.
– ROASW-SS controls and monitors ROASW-AS operation from the Surface Segment. Through the data link (STANAG 7085 compliance), acoustic and non-acoustic sensors (RADAR & FLIR) and tactical data are downlinked and interchanged with other Surface Segments either through a Line Of Sight (LOS) or through Satellite (SATCOM).
Additionally the ROASW system collaborates in a Network Centric Warfare (NCW) allowing the centralization of analysis and taking decisions, providing:
– Communication Surface-To-Helo (S2H): from the ROASW-AS tactical, intelligence and acoustic information is transmitted through a data link (STANAG 7085) towards the ROASW-SS.
– Communication Surface-To-Surface (S2S): tactical and intelligence information is interchanged between two ROASW-SS platforms.
– Communication Surface-To-Satellite (S2SAT): tactical and intelligence information is interchanged beyond LOS (Line Of Sight) capability through a satellite network.
ROASW acoustic capabilities covers from Sonobuoys acoustic signal processing (Analog & Digital Sonobuoys), on-board recording, FAST post-mission acoustic signal analysis (FTAS) and control of deployed sonobuoys through UHF commands, among others.
ROASW small footprint, less weight and low maintenance (LRU approach) allow the installation in small combats ships like OPV, FAC or Patrols (new construction or existing), getting them of powerful ASW capabilities closest to coast line in accordance with new ASW scenario.
The paper “ASW solutions for the modern ASW framework” will be explained in depth by Ignacio Gutiérrez Suanzes (head of ASW line of Business) in the UDT 2014 Exhibiting and Conference, on Thursday 12th Jun at 15:00 hrs (Conference “Underwater Communication”, Session “ASW Solutions for the Modern ASW framework”).